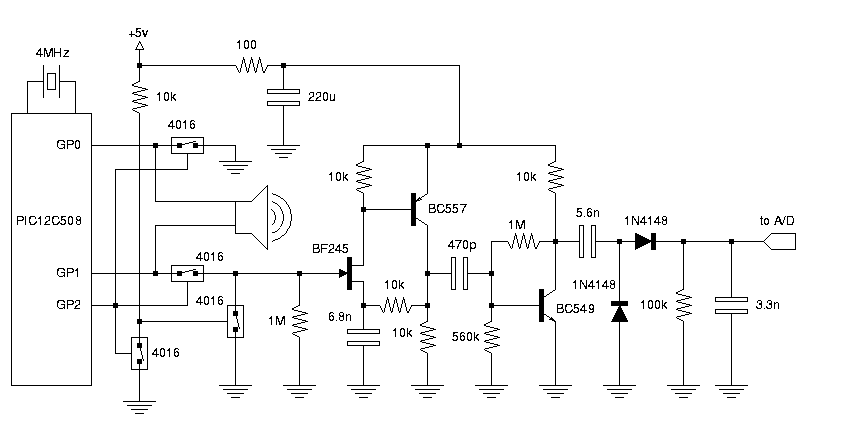
This is the electronic schematic of the homebuilt SONAR. Only one piezoelectric tranducer is used for both tramsmit & receive. This transducer is switched from TX to RX via the four 4016 switches. A high gain amplifier stage & rectifier translates the received echoes into voltage pulses. The timing is controlled by the PIC12C508 8-pin microcontroller as it is shown in the following figure:
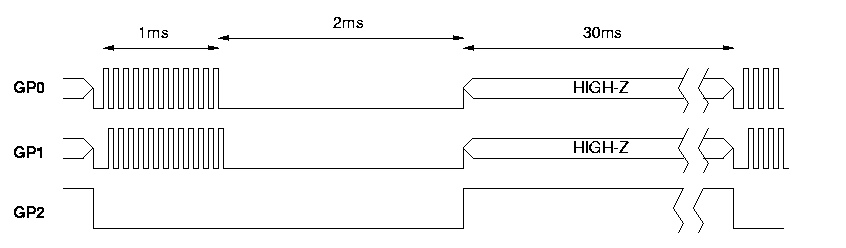
Note that the graph is not drawn in a correct scale: The TX burst comprises 40 cycles (TX frequency of 40 KHz).
The SONAR system is connected to an analog input of a 68HC11 prototype board. The echos are sampled at about 18KHz, with 8 bit resolution. The captured data looks like this:
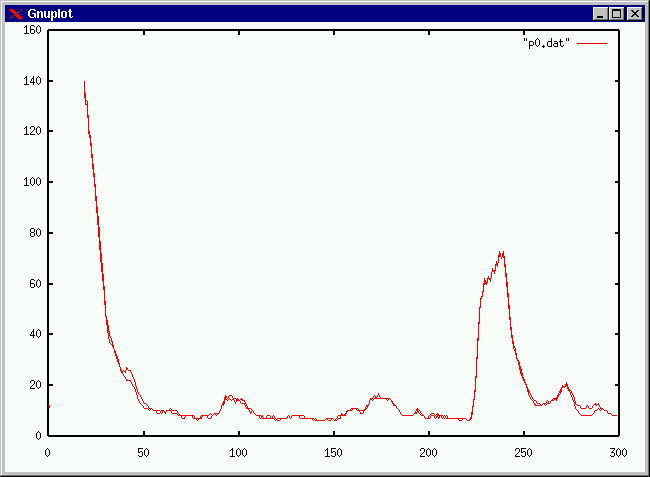
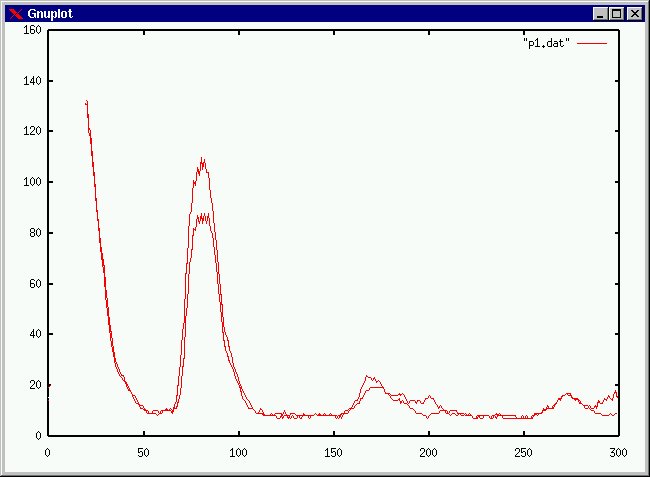
The starting decay is due to the residual trasducer oscilation. This decay limits the minimun range of the SONAR to about 50 cm. The peak around sample 230 is due to a wall echo. The wall was located 2.5m away from the SONAR. The next graph shows the echo of a close obstacle (me :) Two sucessive scans are shown:
Then, the SONAR was mechanically scanned with the help of an stepper motor controlled by the 68HC11. The transmited beam was also focused through a paper horn. The results were:
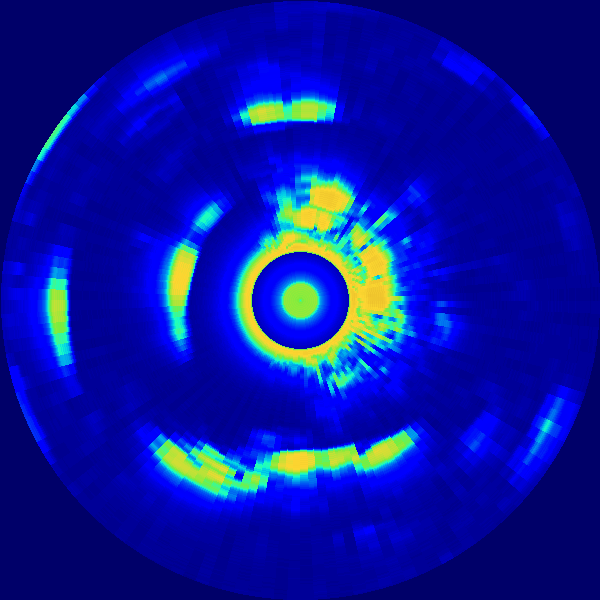
Another posibility for beam focusing is the use of lenses.
The tested lens was of the Fresnel type. This lens was made on a PCB sustrate,
and looks like:
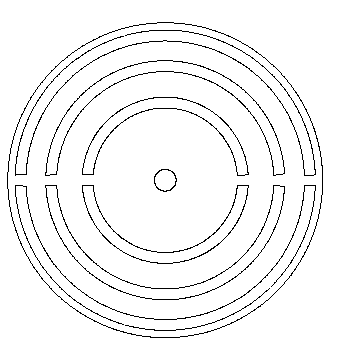
The lens data were: Radius: 5.8 cm, Focus: 5 cm, Bands:
4. (HPGL file: lente.pgl)
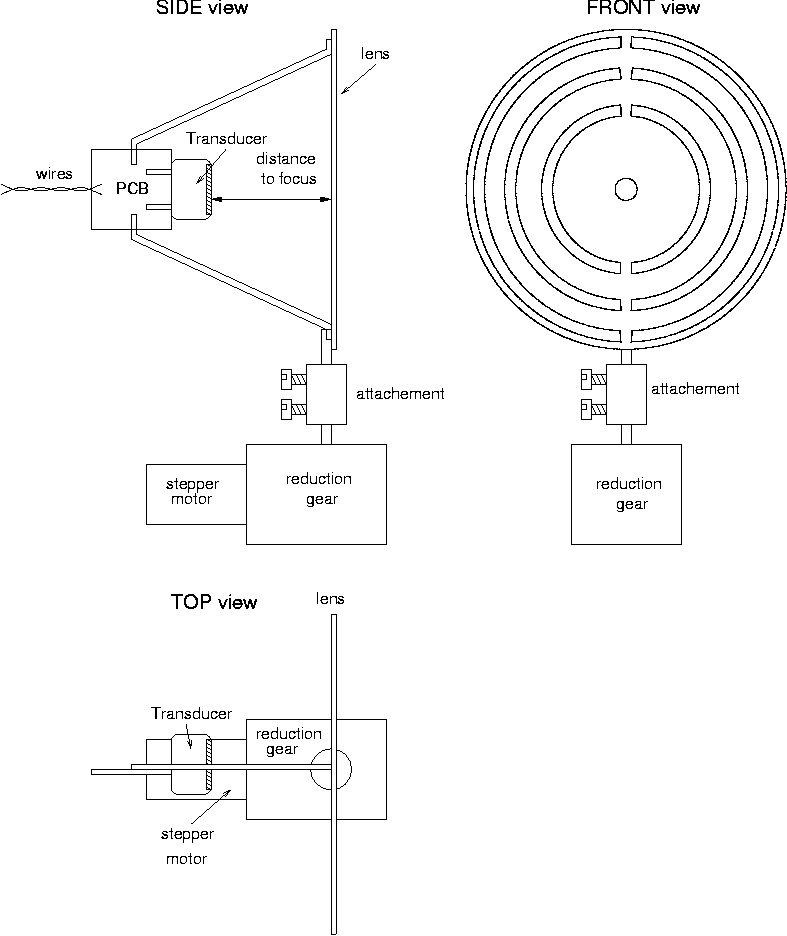
An sketch of the mechanical setup is here: sonar_mech.png
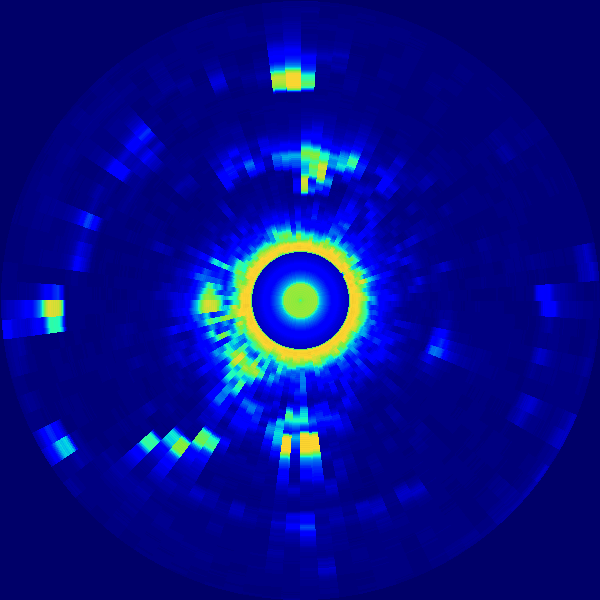
With the use of this lens the beam divergence was greatly reduced, but another problem arises: a notable fraction of the ultrasonic power is reflected back, causing undesired echoes that can be misinterpreted in the short range. The following graph shows the results obtained with the lens. The close echoes in the left are in fact back echoes. In the other hand, the distant echoes are a lot better resolved.
{kind=link}